Akshith Rajkumar
My Portfolio
Roboticist
Akshith is an Electronics and Communication (ECE) engineer pursuing his final year Bachelor’s degree in Vellore Institute of Technology (VIT), Vellore, India. His interest is focused on Embedded Systems, Power Electronics and Control systems. He has extensive experience with developing terrestrial robots and robotic manipulators. He also has significant experience with sensor data acquisition and instrumentation. He has a strong coding background with C/C++, Python, Java and Embedded languages.
His strong leadership qualities along with the technical attributes has helped him lead and guide a team of 25 members in developing Mars prototype Rovers to compete in University Rover Challenge (URC) and Indian Rover Challenge (IRC). His work ethics and skillset also has led him to co-lead Creation Lab, a research-oriented laboratory with various Robotics projects such as CanSats, UAVs and Rovers. He has over 10 months of work experience in a Robotics Start-up based in Bangalore working on an Assistive technology. He is currently working as Research Intern at York University on developing dynamic equations for Fanuc Robotic arm and developing Close-loop position-based visual servo control algorithm. His work will involve a real-time and vision-based pose and motion estimation. He is a Rastrapati award recipient and has over 10 years of experience as a Scout in Bharat Scouts and Guides, India.
Core Interests:
- Embedded Systems
- Power Electronics
- Control Systems
- Robotic Manipulators
- Human - Robot Collaboration
Education
Vellore Institute of Technology - Vellore, India

Chettinad Vidyashram - Chennai, India

Skillset
Tools and Libraries
![matlab]()
![sw]()
![fusion]()
![ros]()
![proteus]()
![cube]()
![keil]()
![eclipse]()
![arduino]()
Programming Languages
![python]()
![c++]()
![ec]()
![java]()
![shell]()
![verilog]()









Programming Languages
![python]()
![c++]()
![ec]()
![java]()
![shell]()
![verilog]()






Experience
Indian Institute of Science Bangalore, India
- Working on Human collaborative system in order to improve safety and reliability.
- Working on Universal Robots UR5 cobot for human collaboration. Implementing various control systems, planning algorithms and perception techniques.
- Working on implementing Virtual Reality to improve perception in HRC.
- Supervised by Prof. Abhra Roy Chowdhury in Robotics Innovations Lab (RIL).
Manipulators Oculus ROS Gazebo Unity

York University Ontario, Canada
- Build dynamic equations for a general 6 DOF robotic manipulator.
- Adapt the equations for a Fanuc 6 DOF robotic manipulator (20iD25) with the physical and geometric parameters.
- Expand the virtual robotic manipulator codes by adding dynamic properties.
- Visual servo control by placing a virtual camera at the end of the robotic manipulator.
- Supervised by Prof. George Zhu at the Space Engineering Design Laboratory
Manipulators Simulink Maple Matlab


Illuminify Private Ltd (Accio Robotics) Bangalore, India
- Design and develop a prosthetic arm from the elbow.
- Designing the control system and the PCBs using various embedded components.
- Developing the power distribution board and battery management system.
- Acquiring sensor data and analysing and mapping arm movement.
- Working on a beetle bot developed for traversing rough terrain.
- Designing the control system and PCBs and testing.
Embedded Systems Power Electronics Sensors Feedback system Embedded C

Team ROVERX Chennai, India
Electronics and Instrumentation Engineer
- Developing mars prototype rovers for University Rover Challenge (URC).
- Working on various systems such as suspension, chassis, manipulator and onboard soil collection system.
- Designing the control system and the power system along with the battery management system.
- Working on the communication system for over a long range (1km).
- Working with various embedded systems, sensors, power components and motors.
- Worked on researching martian conditions and designing Rover prototype for deployment.
- Worked on solving various problem statements related to martian rover systems for an international hackathon.
Terrestrial Robotics Manipulators Motors 3D Printing Sensors Communication Power Electronics
May 2019 - March 2020

Creation Labs Vellore, India
Research Engineer
- Working on space grade PCB to be sent on a CanSat to the lower orbit.
- The project was in collaboration with ISRO. The PCB was designed with embedded sensors to collect data and send it back to Earth.
- Researching and working on sensor array that can survive the launhc and help in monitoring the atmosphere of the satellite.
- Designed and organised IDRL, a national level drone racing competition.
- Leading various projects in the lab and helping with resources and technical advice.
Eagle Sensors Communication Data Processing Power Electronics
May 2019 - March 2020

Publication
Recent Advances on IoT-assisted Wearable Sensor Systems for Healthcare Monitoring.
- IoT has played an essential role in many industries over the last few decades.
- Recent advancements in the healthcare industry have made it possible to make healthcare accessible to more people and improve their overall health.
- The next step in healthcare is to integrate it with IoT-assisted Wearable Sensor Systems seamlessly.
- This review rigorously discusses the various IoT architectures, different methods of data processing, transfer, and computing paradigms.
- It compiles various communication technologies and the devices commonly used in IoT-assisted Wearable Sensor Systems and deals with its various applications in healthcare and their advantages to the world.
- A comparative analysis of all the wearable technology in healthcare is also discussed with tabulation of various research and technology.
- This review also analyses all the problems commonly faced in IoT-assisted Wearable Sensor Systems and the specific issues that need to be tackled to optimize these systems in Healthcare and describes the various future implementations that can be made to the architecture and the technology to improve the healthcare industry.
Recent Projects
MARTIAN ROVER PROTOTYPE
SOIL COLLECTION AND ANALYSIS SYSTEM
- Sensors
- Power distribution system
- Embedded Systems
PROSTHETIC ARM
- Power distribution board
- Embedded system
MARTIAN ROVER
- Control system
- Drill system
- Communication
- Perception
- Soil Sample System
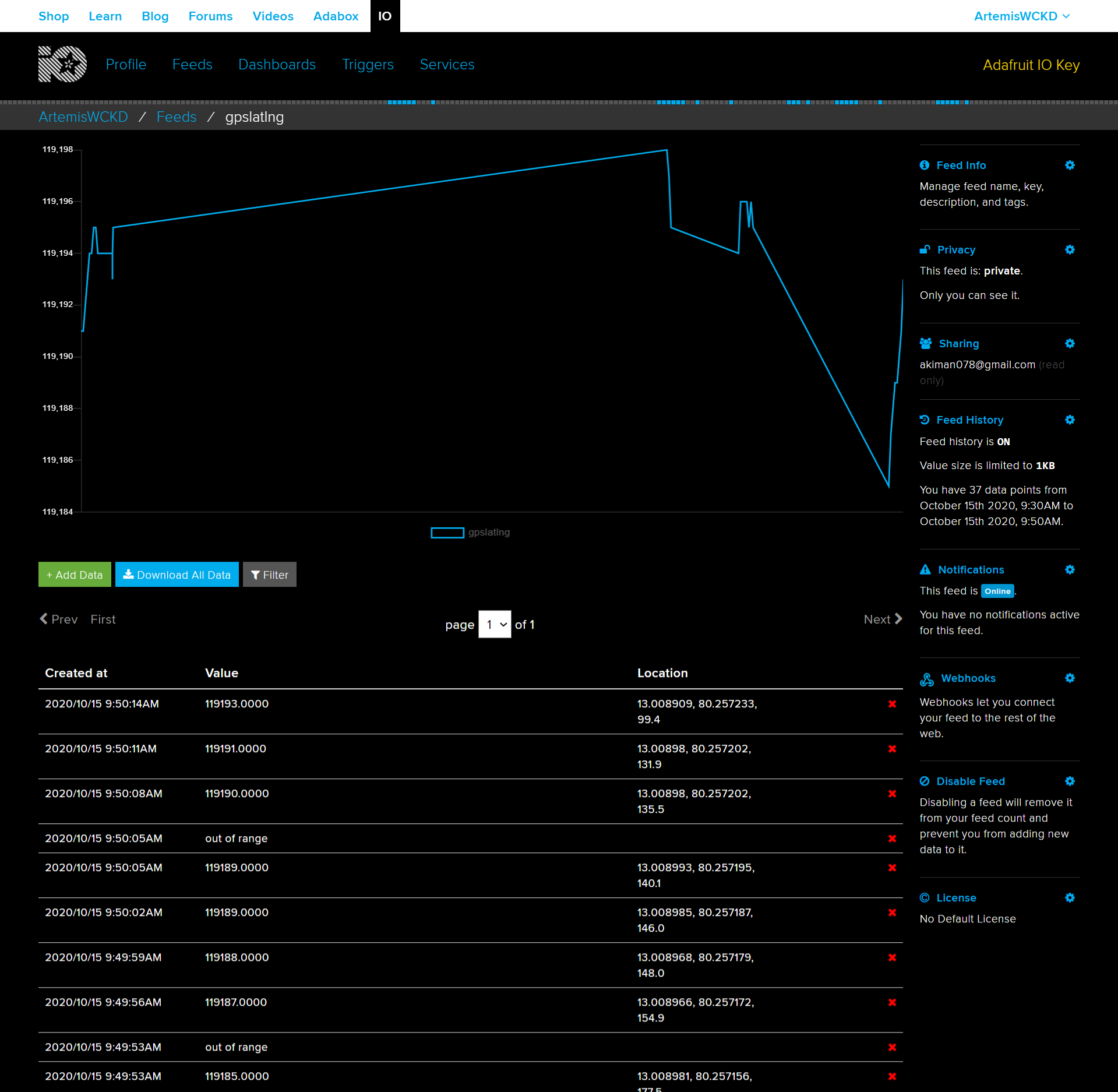
GEO FENCING
- IoT
- Embedded System - NodeMCU
- MQTT protocol
- Adafruit Server
- IFTTT
Click here to view some of my other projects.
Awards
University Rover Challenge (URC) 2021
International Rover Design Challenge (IRDC) 2020
International Mars Hackathon (IMH) 2020
Indian Rover Challenge (IRC) 2020
University Rover Challenge (URC) 2020
The Bharat Scouts and Guides India
Extracurriculars
INSTITUTE OF ELECTRONICS AND TELECOMMUNICATION ENGINEERS IETE
Part of the crew that organised and conducted a 3-day hackathon called ACCESS DENIED. It was the first time the hackathon was conducted and it saw the biggest participation in the history of the institution.

BHARAT SCOUTS AND GUIDES BSG

Contact me
Could relate to work, volunteering or a casual talk!
Feel free to shoot me an email; will get back ASAP!